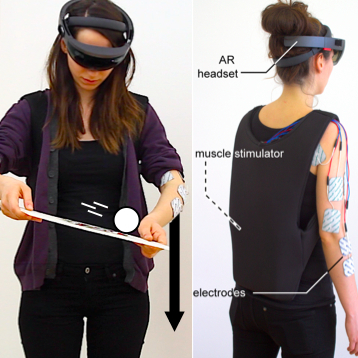
Unfortunately, not much of the existing haptic technology applies to Mixed Reality (MR) or Augmented Reality (AR). While Virtual Reality users have access to haptic gloves and exoskeletons with tactile and force feedback, the main challenge for MR is that users may encounter not only virtual objects, but also physical objects. This means that haptic technolo- gy for AR/MR must leave the users’ hands unencumbered. Furthermore, MR users may want to avoid any kind of bulky technology, as these tend to be visible in MR and in extreme cases might even occlude the real-world objects users are trying to interact with.
While some researchers have proposed ways to simulate the tactile qualities of objects in MR, e.g., by vibrating the user’s fingernails instead of the fingertips, simulating the physical resistance of objects continues to be a challenge. The reason is that the standard solutions based on mechanical actuators such as exoskeleton gloves and wearable pulley systems tend to be large and cumbersome.
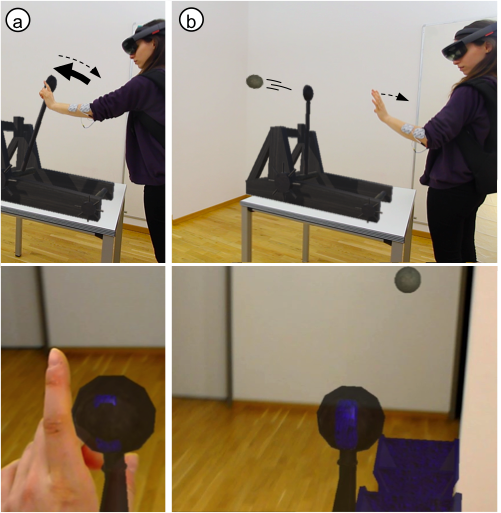
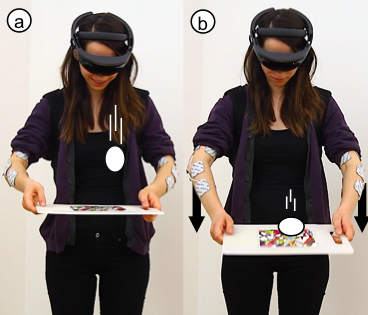
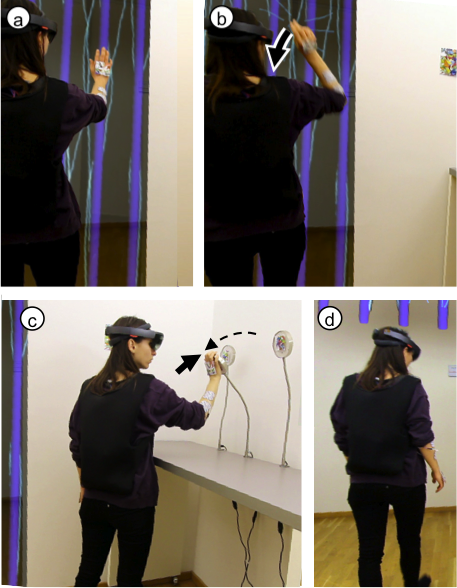
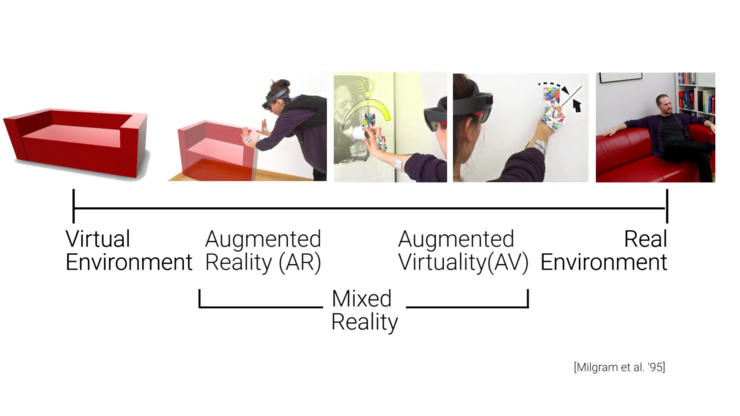
We demonstrate, by means of four simple mixed reality experiences built for the Microsoft HoloLens, how EMS supports force feedback not just in VR (as our previous research demonstrated) but also in the broader spectrum of Reality. This includes adding force feedback on a variety of situations rooted in the Reality-Virtuality continuum, ranging from interacting with purely virtual objects, to passive props and augmented physical devices.