Friedrich, Tobias; Krejca, Martin S.; Rothenberger, Ralf; Arndt, Tobias; Hafner, Danijar; Kellermeier, Thomas; Krogmann, Simon; Razmjou, Armin Routing for On-Street Parking Search using Probabilistic DataAI Communications 2019: 113–124
A significant percentage of urban traffic is caused by the search for parking spots. One possible approach to improve this situation is to guide drivers along routes which are likely to have free parking spots. The task of finding such a route can be modeled as a probabilistic graph problem which is NP-complete. Thus, we propose heuristic approaches for solving this problem and evaluate them experimentally. For this, we use probabilities of finding a parking spot, which are based on publicly available empirical data from TomTom International B.V. Additionally, we propose a heuristic that relies exclusively on conventional road attributes. Our experiments show that this algorithm comes close to the baseline by a factor of 1.3 in our cost measure. Last, we complement our experiments with results from a field study, comparing the success rates of our algorithms against real human drivers.
Arndt, Tobias; Hafner, Danijar; Kellermeier, Thomas; Krogmann, Simon; Razmjou, Armin; Krejca, Martin S.; Rothenberger, Ralf; Friedrich, Tobias Probabilistic Routing for On-Street Parking SearchEuropean Symposium on Algorithms (ESA) 2016: 6:1–6:13
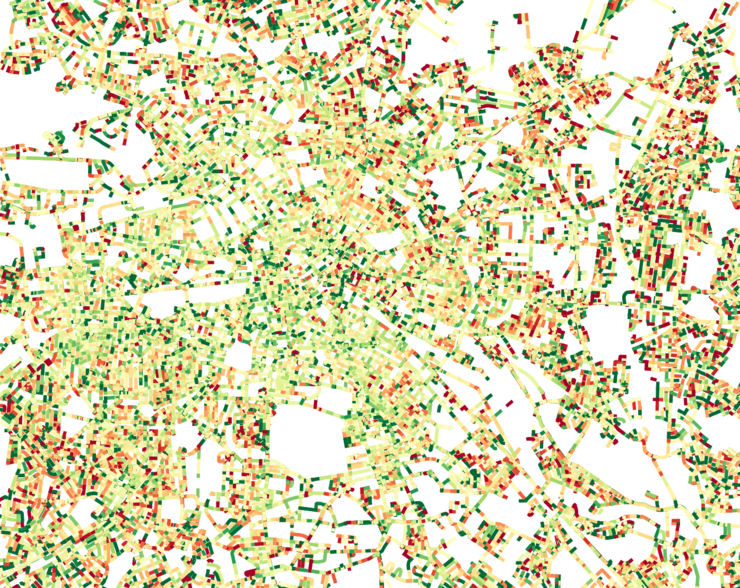
An estimated \(30\%\) of urban traffic is caused by search for parking spots. Traffic could be reduced by suggesting effective routes leading along potential parking spots. In this paper, we formalize parking search as a probabilistic problem on a road graph and show that it is NP-complete. We explore heuristics that optimize for the driving duration and the walking distance to the destination. Routes are constrained to reach a certain probability threshold of finding a spot. Empirically estimated probabilities of successful parking attempts are provided by TomTom on a per-street basis. We release these probabilities as a dataset of about 80,000 roads covering the Berlin area. This allows to evaluate parking search algorithms on a real road network with realistic probabilities for the first time. However, for many other areas, parking probabilities are not openly available. Because they are effortful to collect, we propose an algorithm that relies on conventional road attributes only. Our experiments show that this algorithm comes close to the baseline by a factor of 1.3 in our cost measure. This leads to the conclusion that conventional road attributes may be sufficient to compute reasonably good parking search routes.