In Proc. TEI'19. Full Paper
PDF
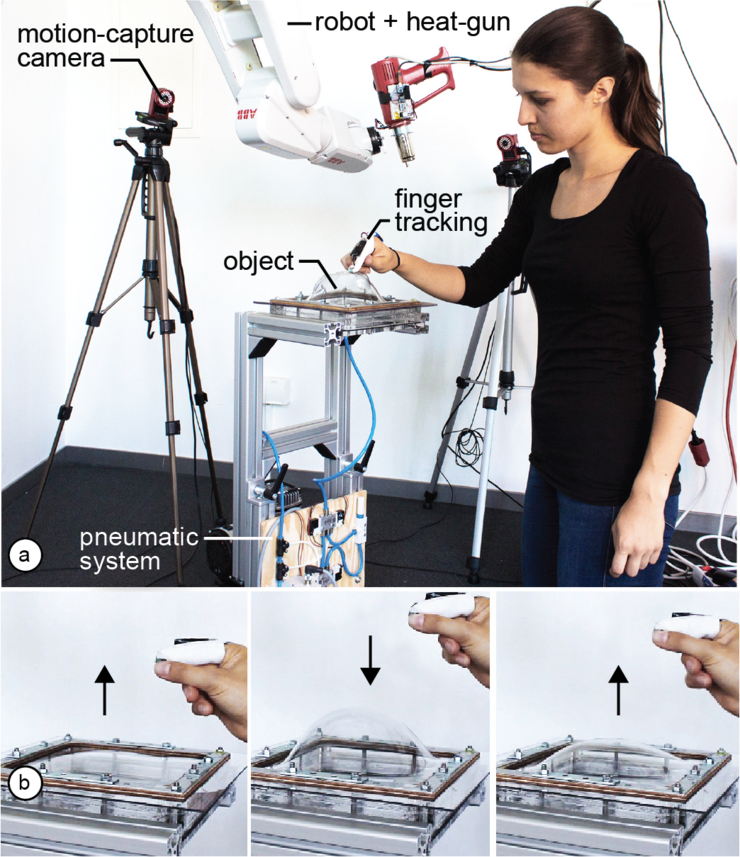
Several systems have illustrated the concept of interactive fabrication, i.e. rather than working through a digital editor, users make edits directly on the physical workpiece. However, so far the interaction has been limited to turn-taking, i.e., users first perform a command and then the system responds with physical feedback. In this paper, we present a first step towards interactive fabrication that changes the workpiece while the user is manipulating it.
FormFab reshapes the workpiece while users are moving their hands. This enables users to interactively explore different sizes of a shape with a single interaction.