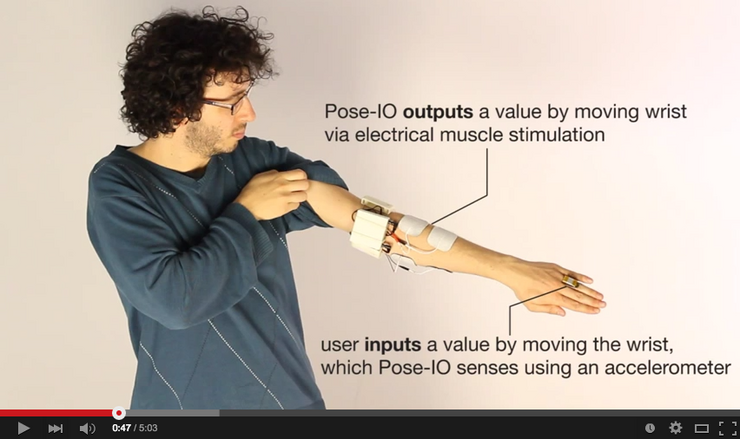
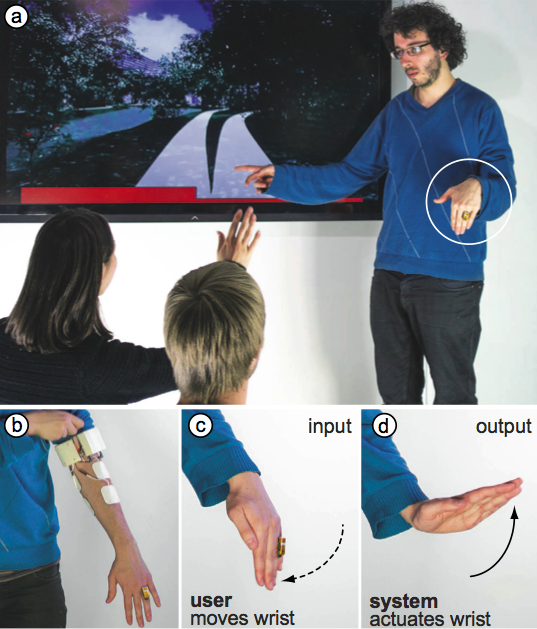
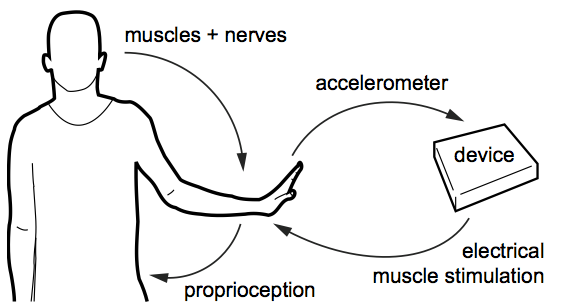
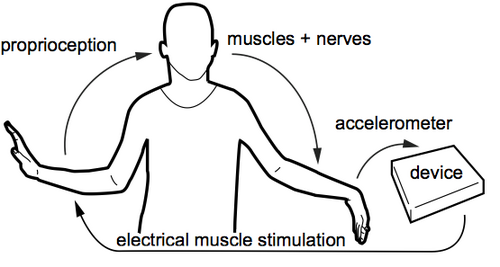
We propose a new way of eyes-free interaction for wearables. It is based on the user’s proprioceptive sense, i.e., rather than seeing, hearing, or feeling an outside stimulus, users feel the pose of their own body. We have implemented a wearable device called Pose-IO (Figure 1) that offers input and output based on proprioception. Users communicate with Pose-IO through the pose of their wrists. Users enter information by performing an input gesture by flexing their wrist, which the device senses using a 3-axis accelerometer. Users receive output from Pose-IO by finding their wrist posed in an output gesture, which Pose-IO actuates using electrical muscle stimulation. This mechanism allows users to interact with Pose-IO without visual or auditory senses, but through the proprioceptive sense alone.