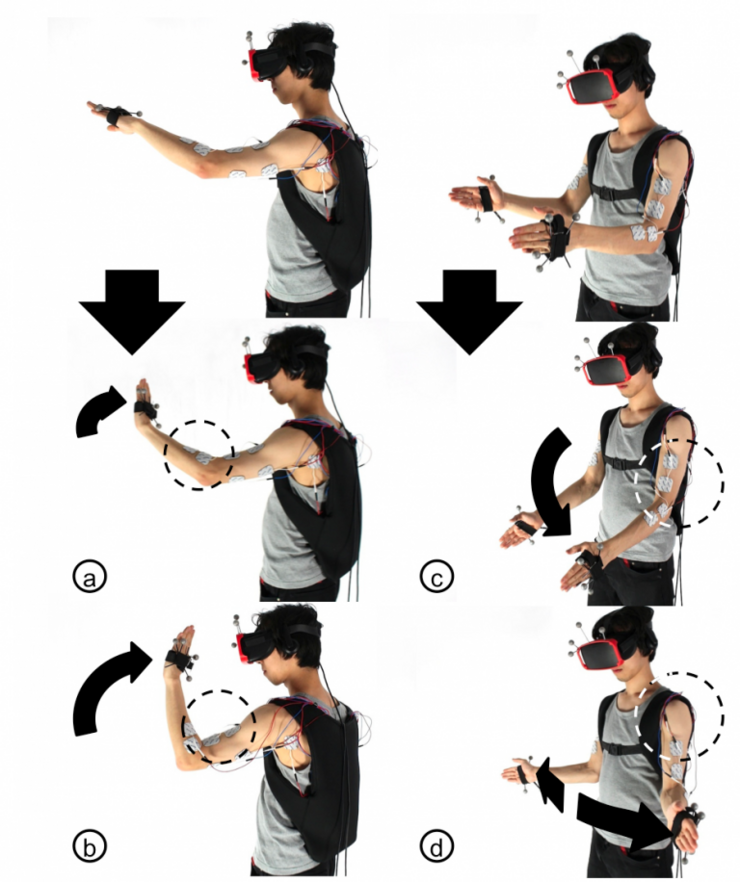
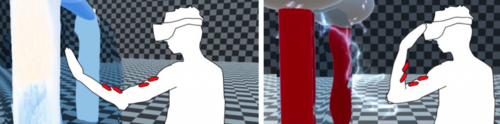
The figure above illustrates the naïve approach to rendering objects using EMS: (a) From the moment the user’s fingertips reach the virtual wall, we actuate the user’s hand just strongly enough to prevent it from passing through. We achieve this with a current essentially proportional to the user’s force (further details in Implementation).
When we built this version, the results looked great. The design prevents the user’s hand from passing through the object and thus bystanders observing the scene would typically conclude that the illusion was “working”. However, during piloting, it became clear that this design did not work. Since the EMS actuation was as long and as strong as the user kept pushing, the EMS signal (a tingling in the respective muscles) could become arbitrarily strong. This would draw the user’s attention to the EMS-actuated muscles. These, however, were pointed in the wrong direction, i.e., they were pulling, when the sensation was supposed to be about pushing. One participant in our pilot said this design felt “like a magnet pulling the hand backwards”. While this design was reasonably impermeable, consistent, and definitely familiar, the strong EMS signal made this design fail with respect to our primary objective: it was not believable.
We, therefore, created two alternative designs with the objective of increasing believability: