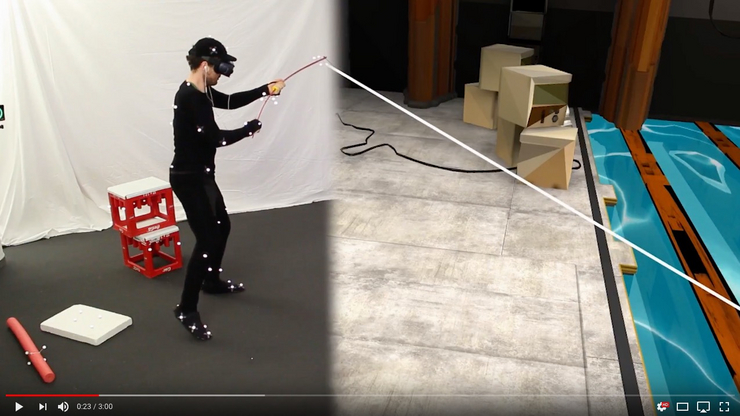
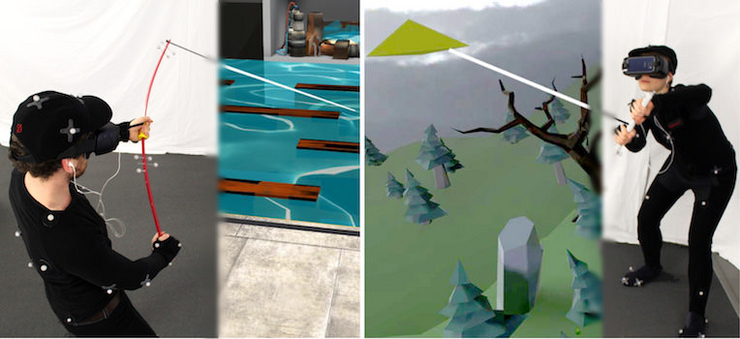
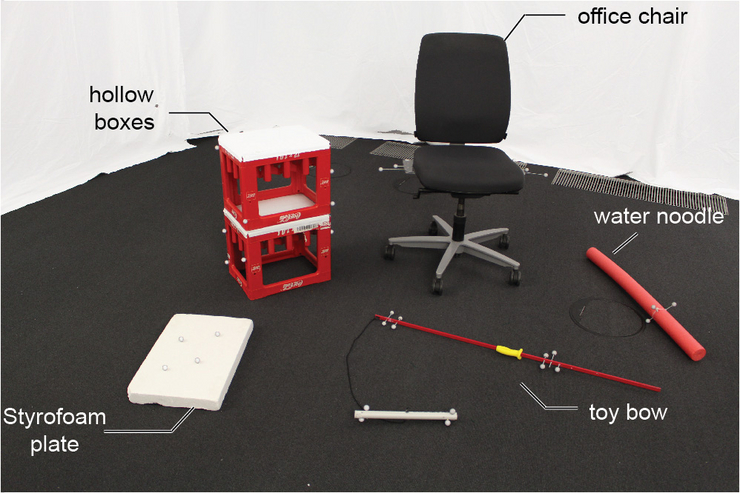
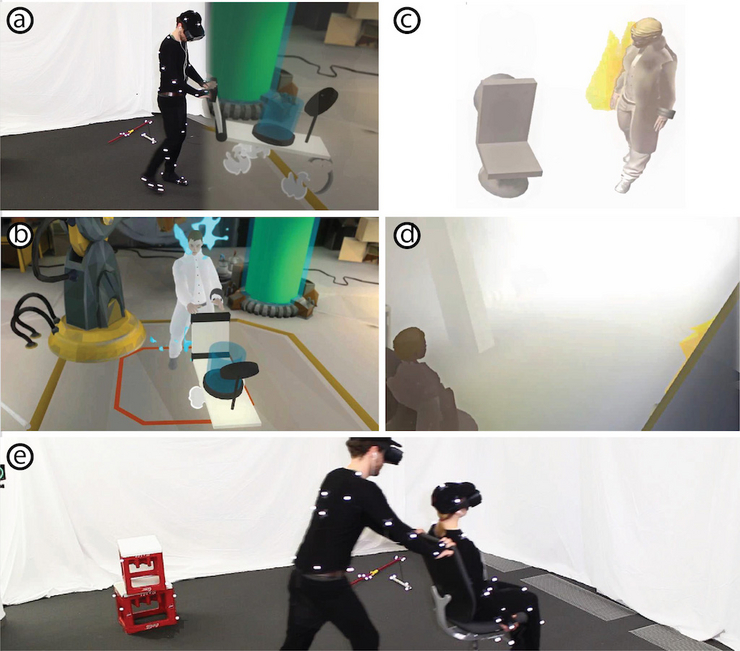
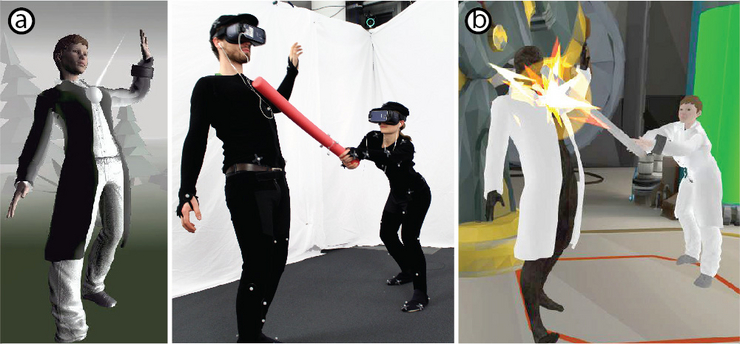
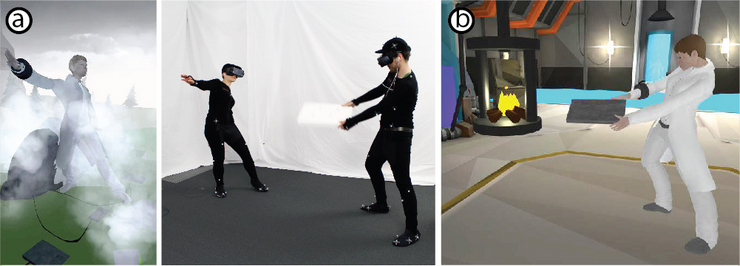
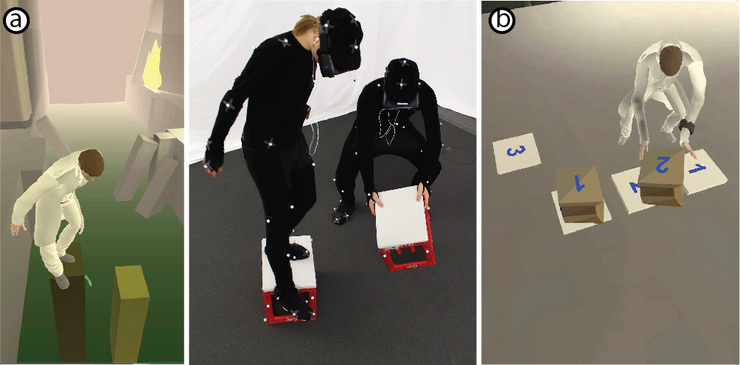
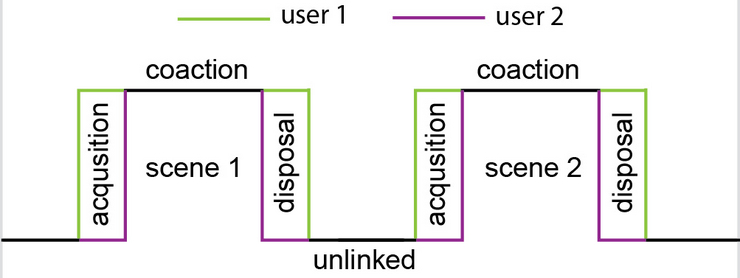
Our system, Mutual Turk, achieves this by (1) offering shared props through which users can exchange forces while obscuring the fact that there is a human on the other side, and (2) synchronizing the two users’ timelines such that their way of manipulating the shared props is consistent across both virtual worlds. We demonstrate mutual human actuation with an example experience in which users pilot kites though storms, tug fish out of ponds, are pummeled by hail, battle monsters, hop across chasms, push loaded carts, and ride in moving vehicles.