Für das allgemeine Impressum, siehe HPI-Impressum.
Die vorliegende Lehrwebsite entstand im Rahmen eines Projekts des Moduls Algorithmen und
Datenstrukturen an der FSU-Jena.
Als Vorbild, was den Aufbau der Themen, einzelne Definitionen sowie Terminologie angeht, diente
Reinhard Diestels Graphentheorie (Elektronische Ausgabe 2000, Springer).
Sollten etwaige Fehler auftreten oder Fragen bestehen, wenden Sie sich bitte an
dennis.kerzig[at]uni-jena.de.
Im Folgenden noch eine kurze Übersicht genutzter Frameworks und Bibliotheken:
Der Balken beschreibt deinen Fortschritt beim Lösen aller Aufgaben. Schaffst du es, alle
Fragen richtig zu beantworten?
Text-Legende
Hervorhebung im Text
Erklärung
Begriff
Begriffs-Definition/-Einführung
Begriff
Extra Erläuterung als Popup
Ausdruck
Quelltext oder Zeichenkette
Aufgaben-Legende
Alle Feedbacks, die für eine deiner Lösungen bekommen kannst. Zum abschicken der Lösung musst
du davor auf Lösungen überprüfen drücken.
Eingabefeld
Feedback
Richtige Antwort
Bisher noch keine Eingabe oder falsches Eingabeformat
Falsche Lösung, vielleicht auch falsches Eingabeformat.
Zum ersten mal da? Hinweise zur Benutzung der Website findest du unter dem -Symbol oben. Am besten du nutzt
zum Einarbeiten in das Themengebiet auch weiterführende Literatur. Siehe dazu die Links am Ende der
Seite.
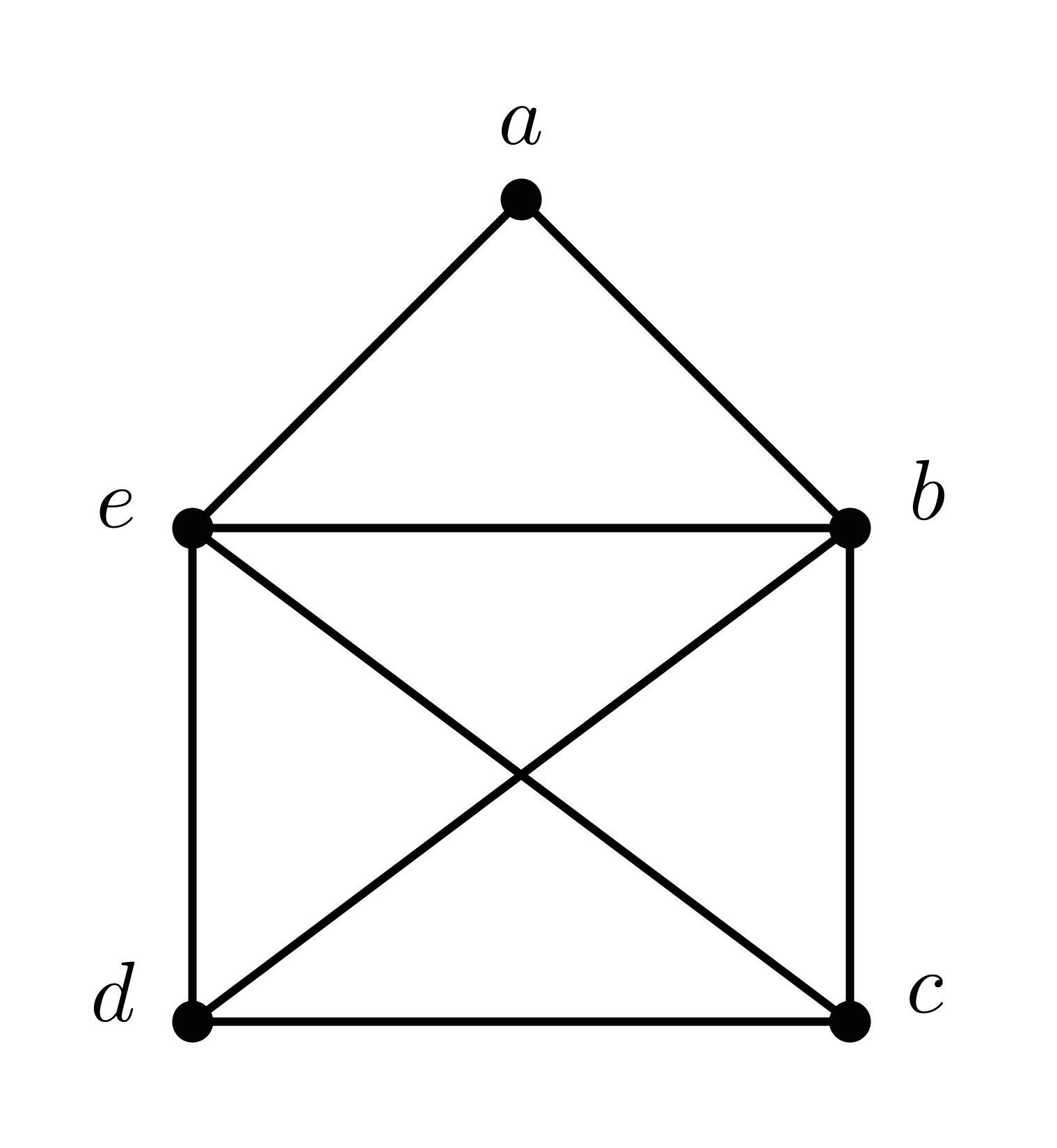
1. Das Haus vom Nikolaus
Das Haus vom Nikolaus als Graph \(N = (V,E)\) mit \(V=\{a,b,c,d,e\}\).
Sicher hat jeder von euch schon einmal versucht das Haus vom Nikolaus auf einem Blatt Papier zu
zeichnen. Natürlich ohne zwischendurch abzusetzen oder eine Kante mehrfach zu zeichnen. Doch
funktioniert das, egal bei welchem Knoten man anfängt? Und wieso geht das plötzlich nicht mehr, wenn der
Nikolaus sein Haus um einen Anbau erweitert? Zur Formalisierung und Lösungsfindung solcher und vieler
weiterer Probleme — wie beispielsweise der Routenplanung, Landkartenfärbung und
Flussoptimierung — bietet sich ein Teilgebiet der Mathematik besonders an: die
Graphentheorie.
Im Folgenden führen wir den Grundbegriff eines Graphen ein und nennen wichtige Eigenschaften und
Operationen. Ein Graph \(G\) ist ein Tupel aus der Menge seiner Knoten
\(V(G)\) und der Menge seiner Kanten \(E(G)\). Wir schreiben dann verkürzend \(G=(V,E)\).
Die Kanten ungerichteter Graphen setzen sich aus 2-elementigen, verschiedenen Teilmengen der \(v
\in V\) zusammen. Bei uns steht \(n\) für die Anzahl aller Knoten \(|V|\) und \(m\) analog dazu für die
Anzahl aller Kanten \(|E|\). Enthält \(E\) alle \(n(n-1)
/ 2\) möglichen Teilmengen, nennt man \(G\) einen vollständigen Graphen \(K^n\).
Zwei Knoten \(v_1\) und \(v_2\) nennt man benachbart bzw. adjazent, wenn gilt, dass
\(\{v_1,v_2\} \in E\). Die Knoten \(v_1\) und \(v_2\) nennt man inzident zur Kante
\(\{v_1,v_2\}\).
Die Anzahl aller inzidenten Kanten eines Knotens \(v\) nennt man den Knotengrad
\(\mathrm{deg}_G(v)\). Der maximale Knotengrad \(\Delta(G)\) bezeichnet den Knotengrad
eines Knotens mit den meisten inzidenten Kanten. Analog ist der minimale Knotengrad als
\(\delta(G)\) definiert.
Wähle einen Teilgraphen, um die Veränderungen zum obigen Ausgangsgraphen \(T\) zu sehen.
Im Kontext eines Graphen \(G\) werden herkömmliche Mengenoperationen, wie sie z. B. bei den
Mengen \(V\) oder \(E\) Anwendung finden, erweitert und abgekürzt. Anstatt einen entsprechenden Knoten
explizit der Knotenmenge eines Graphen hinzuzufügen, schreibt man auch \(G \cup \{v\}\) oder \(G+v\).
Entnimmt man einen Knoten, also \(G' = G \setminus \{v\}\) oder \(G' = G - v\), so enthält \(G'\) weder \(v\) noch die zu \(v\)
inzidenten Kanten. Die Notation zum Hinzufügen und Entfernen von Kanten ist analog. Entfernt man jedoch
die letzte zu einem bestimmten Knoten inzidente Kante, so bleibt der Knoten trotzdem Teil des Graphen.
Man nennt solche Knoten isoliert.
Existiert zu einem Graphen \(H = (V_H, E_H)\) ein Graph \(H' = (V_{H'}, E_{H'})\), so dass \(V_{H'}
\subseteq V_H\) und \(E_{H'}
= \{e\in E_H \text{ : } e \cap V_{H'} = e \}\) gelten, dann nennt man \(H'\) den durch
\(V_{H'}\) induzierten Teilgraphen von \(H\). Dafür schreibt man auch \(H' = H[V_{H'}]\).
Allgemeiner bezeichnet man \(H'\) als Teilgraphen von \(H\), wenn \(V_{H'} \subseteq V_H\)
und \(E_{H'} \subseteq E_H\) gilt.
Verständnisaufgaben zu Abschnitt 1
Beweisaufgabe
— Kannst du’s zeigen?
Die Anzahl der Knoten ungeraden Grades in einem Graphen \(G = (V,E)\) ist gerade.
Hinweise
Konstruiere die Mengen aller ungeraden und geraden Knoten und addiere ihre Knotengrade.
Beispiellösung
Wir partitionieren die Knotenmenge \(V\) in \(V_1 = \{v \in V \text{ : } d_G(v) \text{
gerade}\}\) und \(V_2 = \{v \in V \text{ : } d_G(v) \text{ ungerade}\}\), welche
respektive die Menge aller Knoten geraden und ungeraden Grades darstellen. Zählt man die
Knotengrade aller Knoten zusammen, so umfasst diese Zahl jede Kante genau zweimal,
nämlich für jeden inzidenten Knoten: \(\sum\limits_{v\in V} d_G(v) = 2|E|\). Es folgt
also \(\sum\limits_{v\in V_1} d_G(v) + \sum\limits_{v\in V_2} d_G(v) = 2|E|\). Der erste
Summand muss gerade sein, weil er die Summe gerader Knotengrade darstellt. Da \(2|E|\)
ebenfalls gerade ist, folgt, dass der zweite Summand auch gerade ist. Da eine Summe
ungerader Zahlen nur bei einer geraden Anzahl von Summanden gerade ist, folgt die
Aussage.
2. Pfade und Kreise
Wähle einen Kreis/Pfad, um ihn im obigen Graphen \(I\) hervorzuheben.
Ein Weg oder auch Pfad der Länge \(k\) von \(v_1\) nach \(v_{k+1}\) bezeichnet
einen nichtleeren Graphen \(P^k=(V_P,E_P)\) mit \(V_P = \{v_1,v_2,...,v_{k + 1}\}\) (wobei die Knoten
paarweise disjunkt sind, also für alle \(i
\neq j\) gilt, dass \(v_i \neq v_j\)) und \(E_P=\{\{v_1,v_2\},\{v_2,v_3\},...,\{v_k,v_{k + 1}\}\}\).
Da \(V_P\) bzw. \(E_P\) den Pfad vollständig definieren, notieren wir einen Pfad oftmals einfach als
Folge von Knoten oder Kanten.
Ähnlich zu einem Pfad bezeichnet man für einen Graphen \(G = (V, E)\) eine Knotenfolge \(P=v_1v_2...v_{k
+ 1}\), für die für alle \(i \leq k\) gilt, dass \(\{v_i, v_{i + 1}\} \in E\), als
Kantenzug. Bei diesem dürfen also Knoten und Kanten mehrfach vorkommen.
Ausgehend von dieser Definition nennt man \(P^k\) einen \(A\)-\(B\)-Weg
genau dann, wenn \(V_P\cap A = \{v_1\}\) und \(V_P\cap B = \{v_{k + 1}\}\) gilt. Analog dazu ist ein
\(s\)-\(t\)-Weg ein
\(A\)-\(B\)-Weg mit \(A=\{s\}\) und \(B=\{t\}\).
Anmerkung: In der Literatur werden die Begriffe Weg und Kantenzug nicht einheitlich verwendet. Teils wird ein Kantenzug (also mit Knotenwiederholung) auch als Weg bezeichnet, und ein einfacher Weg beschreibt eine verbundene Knotenfolge ohne Knotenwiederholung (siehe z. B. Weg (Wikipedia)).
Der Abstand \(d_G(v_1,v_2)\) zweier Knoten \(v_1\) und \(v_2\) in \(G\) ist definiert als
die minimale Kantenanzahl eines \(v_1\)-\(v_2\)-Weges. Den größtmöglichen Abstand zweier Knoten nennt
man den Durchmesser von \(G\) oder \(\mathrm{diam}(G)\). Außerdem nennt man einen Knoten
\(v\) zentral, wenn sein Abstand zum entferntesten Knoten minimal ist.
Als Kreis \(C^k\) bezeichnet man formal \(C^k = P^{k-1} + \{v_k, v_1\}\), wobei der Weg
\(P^{k - 1}\) gleichzeitig als Knotenfolge \(v_1,...,v_k\) und auch als Graph
\(P^{k-1}=(\{v_1,v_2,...,v_k\}, \{\{v_1,v_2\},...,\{v_{k-1},v_k\}\})\) betrachtet werden kann. Erweitert
man diesen Weg um die zusätzliche Kante \(\{v_k, v_1\}\), entsteht ein geschlossener Weg der Länge \(k
> 1\): ein Kreis eben. Enthält ein Graph keinen Kreis, so nennt man ihn kreisfrei.
Erfüllt ein Weg die besondere Eigenschaft, alle Knoten des zugehörigen Graphen genau einmal zu
enthalten, so nennt man ihn einen Hamiltonweg. Ist der Weg zusätzlich geschlossen,
existiert also eine Kante zwischen Anfangs- und Endknoten, dann spricht man von einem
Hamiltonkreis. Transformiert man diese Überlegungen auf unser anfängliches Problem, dem
Haus vom Nikolaus, dann sucht man einen Kantenzug, der nicht alle Knoten, sondern alle Kanten des
Graphen \(N\) genau einmal besucht: einen Eulerweg. Analog zum Hamiltonkreis ist ein
Eulerkreis definiert.
Verständnisaufgaben zu Abschnitt 2
Algorithmusaufgabe
Entwickle einen Algorithmus, der für einen gegebenen Graphen \(G\) und zwei verschiedene
Knoten a und b entscheidet, ob ein \(a\)-\(b\)-Weg in \(G\)
existiert. Beweise zudem die Korrektheit deines Algorithmus und gib die Laufzeit in der
O-Notation an. Die Datenstruktur des Graphen kannst du dir frei
überlegen (siehe z. B Adjazenzliste, Adjazenzmatrix).
Hinweise
Traversiere den Graphen vollständig und merke dir,
welche Knoten du bereits besucht hast. Nutze zum Traversieren einen Stack oder
eine Queue.
Beispiellösung
Ich nehme an, der Algorithmus bekommt den Graphen als Knotenarray übergeben, welches
pro Knoten sowohl die Methode neighbours() implementiert, um alle
Nachbarknoten zu ermitteln, sowie die Instanzvariable visited vom
Typ Boolean enthält, die im Initialzustand false ist und
angibt, ob ich den jeweiligen Knoten bereits besucht habe.
// Stapel initialisieren und Anfangsknoten drauflegen
Stack s = new Stack();
s.push(a);
a.visited = true;
while !s.isEmpty() {
Node v = s.pop();
// Durchlaufe alle noch nicht besuchten Nachbarn von v
for Node n in v.neighbours() {
if n.visited == false {
n.visited = true;
s.push(n);
// Ist der Knoten der Zielknoten, so existiert ein Pfad
if n == b { return true; }
}
}
}
// Alle erreichbaren Knoten wurden durchlaufen ohne 'b' zu finden.
return false;
Korrektheit des Algorithmus
Dass der Zielknoten b genau dann auf dem Stack liegt, wenn er von
a aus erreichbar ist, zeige ich in zwei Richtungen. \((\rightarrow )\)
Ich nehme an, der Knoten b liegt auf dem Stack s. Da
gefordert ist, dass Ziel- und Anfangsknoten unterschiedlich sind, muss er also in
der for-Schleife auf den Stack gelegt worden sein, die über alle
unbesuchten Nachbarn eines anderen Knotens \(v\) iteriert. Da für \(v\) das gleiche
Argument gilt, existiert eine Kette aus Nachbarn bis zum Startknoten a,
der Eingabegraph enthält also ein a-b-Weg. \((\leftarrow
)\) Aus der Annahme, dass ein a-b-Weg existiert folgt,
dass es eine Kette von Nachbarn existiert, über die b von
a aus erreichbar ist. Da Knoten bloß als besucht markiert werden, wenn
sie bereits einmal auf dem Stack waren, muss also jeder dieser Nachbarn der Kette
einmal auf dem Stack gelegen haben. Das gilt auch für den direkten Nachbarn von
b (wovon er mindestens einen haben muss, weil ein Weg zu ihm
existiert), weswegen folgt, dass auch b einmal auf dem Stack liegt.
Direkt nachdem der Zielknoten auf den Stack gelegt wurde, wird festgestellt, dass er
der gesuchte Knoten ist und ein Weg existiert.
Terminierung des Algorithmus
Die einzige Stelle, an der der Algorithmus in eine Endlosschleife fallen könnte,
ist in der while-Schleife, die solange läuft bis der Stack leer ist.
Jeder Knoten des Eingabegraphen liegt höchstens einmal auf dem Stack, weil er
beim Drauflegen gleichzeitig als besucht markiert wird und Knoten, die als
besucht markiert wurden, später nicht mehr betrachtet werden. Da unser
Eingabegraph zusätzlich logischerweise endlich ist, folgt, dass die Schleife
bloß endlich viele Durchläufe macht.
Laufzeit des Algorithmus
Im Worstcase sind alle Knoten des Graphen zusammenhängend und der
Zielknoten wird erst erreicht, wenn bereits alle anderen Knoten auf dem Stack
waren. Da bis zu diesem Punkt für jeden Knoten des Graphen alle Nachbarn
durchlaufen wurden, egal ob sie bereits besucht wurden oder nicht, entspricht
die Laufzeit pro Knoten \(v\) genau \(\mathcal O(d_G(v))\). Weil jeder Knoten
des Graphen genau einmal auf dem Stack landet, ergibt sich folgende
Gesamtlaufzeit von \(\mathcal O(n+2m) = \mathcal O(n+m)\).
3. Zusammenhang
Der Graph \(Z\) besitzt drei Komponenten: \(Z[\{a,b,c\}]\), \(Z[\{d,e\}]\) und
\(Z[\{f\}]\)
Eine wichtige Eigenschaft von Graphen ist der Zusammenhang. Man nennt einen Graphen
zusammenhängend, wenn für alle Knotenpaare \(a, b\) ein \(a\)-\(b\)-Weg existiert. Einen
maximal
zusammenhängenden Teilgraphen bezeichnet man als Komponente des jeweiligen Graphen. Ein
zusammenhängender Graph, wie z. B. der Nikolaus-Graph \(N\), besitzt genau eine
Komponente.
Man nennt einen Graphen \(G\) genau dann \(k\)-zusammenhängend, wenn es eine Knotenmenge
mit Mächtigkeit \(\geq k\) gibt, deren Entfernen zu einem unzusammenhängenden oder leeren Graphen führt,
wohingegen das Entfernen einer beliebigen Knotenmenge mit Mächtigkeit \(< k\) den Graphen nicht
zerfallen lässt. Jeder \(k\)-zusammenhängende Graph ist also gleichzeitig \((k-1)\)-, \((k-2)\)-,
... und \(0\)-zusammenhängend. Der Zusammenhang \(\kappa(G)\) steht für das größte
\(k\), für das \(G\) \(k\)-zusammenhängend ist. Analog dazu ist der Kantenzusammenhang
\(\lambda(G)\) und die Eigenschaft eines Graphen \(l\)-kantenzusammenhängend zu sein
definiert. Achtung: Die Definition von \(k\)-Zusammenhang ist in der Literatur nicht
einheitlich.
Verständnisaufgaben zu Abschnitt 3
Beweisaufgabe
— Kannst du’s zeigen?
Ist ein Graph \(G = (V,E), n = |V|\) zusammenhängend, so existiert eine
Aufzählung \((v_1, \ldots, v_n)\) seiner Knoten, sodass für jedes \(k<n\) der induzierte Teilgraph \(G[\{v_1,\ldots,v_k\}]\)
zusammenhängend ist.
Hinweise
Wähle ein beliebiges \(v_1\) und versuche nun mit einer bestimmten Reihenfolge über die
Knoten zu traversieren (vgl. Algorithmusaufgabe, Abschnitt 2). Du kannst auch
einen Algorithmus entwerfen, der das Problem löst und ihn beweisen (Terminierung,
Korrektheit).
Beispiellösung
Ich werde die Aussage zeigen, indem ich einen Algorithmus angebe, der für einen
zusammenhängenden Graphen als Eingabe die gesuchte Aufzählung liefert. Dann zeige
ich seine Korrektheit und Terminierung. Der Eingabegraph
G ist eine Menge aller Knoten, die jeweils über die Instanzmethode
neighbours() die Menge aller adjazenten Knoten liefert.
// Geordnete Liste initialisieren und beliebigen Startknoten drauflegen
List l = new List();
l.append(G[0]);
while |l| < |G| {
// Menge aller zu l[0],...,l[|l|-1] adjazenten Knoten ohne l
Set newNeighbours = new Set();
for Node n in l {
newNeighbours += (n.neighbours() - l);
}
l.append(newNeighbours[0])
}
return l;
Korrektheit
Für meinen Beweis wähle ich die geforderte Eigenschaft der Aufzählung als Schleifeninvariante für die äußere while-Schleife,
nämlich \(G[l] \text{ zusammenhängend}\). Weil ich in jedem Schleifendurchlauf genau
einen Knoten hinzufüge, treffe ich damit jedes \(k \leq n\). Zur Initialisierung, also vor
dem ersten Schleifendurchlauf, trifft die Invariante zu, da ein Graph mit nur einem
Knoten immer zusammenhängend ist. Angenommen, die Aussage stimmt im \(j\)-ten Durchlauf.
Ich zeige nun, dass daraus folgt, dass die Aussage im \((j+1)\)-ten Durchlauf auch
stimmt. Nach Ende der inneren for-Schleife ist jeder Knoten \(v_i\) der Menge
newNeighbours mit mindestens einem Knoten aus l adjazent, weil
(wegen Annahme) der induzierte Teilgraph \(G[l]\) zusammenhängend ist, muss deswegen
auch \(G[l+v_0]\) zusammenhängend sein.
Terminierung
Da der Eingabegraph zusammenhängend ist, wächst l solange um genau einen
Knoten pro Iteration, bis alle Knoten aus G enthalten sind. Das sieht man
leicht an der Kontraposition: Ist l noch nicht nicht so groß wie G und newNeighbours ist
nach der for-Schleife leer, so ist G nicht zusammenhängend.
Algorithmusaufgabe
Entwickle zwei Algorithmen, die für einen gegebenen Graphen \(G\) entscheiden, ob er
zusammenhängend ist. Nutze für die erste Variante den Algorithmus der
Aufgabe von Abschnitt 2, nennen wir ihn z. B.
existiertWeg(a,b,Graph), der true liefert, wenn ein a-b-Weg im
Eingabegraphen existiert, sonst false. Die zweite Variante
soll den Algorithmus der Beispiellösung aus Abschnitt 2 modifizieren.
Gib für beide Varianten eine Laufzeit in O-Notation an. Korrektheits- und
Terminierungsbeweise brauchst du dieses Mal nicht zu machen.
Hinweise
Für Variante 1: Implementiere die exakte Definition von Zusammenhang.
Für Variante 2: Nutze die visited-Instanzvariable eines jeden Knotens.
Wähle einen beliebigen Startpunkt für die Traversierung.
Beispiellösung
Variante 1
Der Eingabegraph G ist genau dann zusammenhängend, wenn für alle seine
Knoten \(a,b\) ein \(a\)-\(b\)-Weg existiert. Man durchläuft also alle
\(\binom{n}{2}\) Knotenpaare und ruft existiertWeg(a,b,Graph) auf, was
jeweils \(\mathcal O(n+m)\) dauert.
forall pairs of Nodes (a, b) in G {
if !existiertWeg(a,b,G) { return false; }
}
return true;
Daraus ergibt sich eine ernüchternde Gesamtlaufzeit von \(\mathcal O(n*(n-1)/2*(n+m)) =
\mathcal O(n^3+mn^2)\).
Variante 2
Wir nehmen den Algorithmus aus der Aufgabe von Abschnitt 2 und entfernen die
Überprüfung auf einen gewissen Zielknoten. Wir lassen die Tiefensuche
solange arbeiten, bis sie alle erreichbaren Knoten besucht hat. Existiert dann
trotzdem noch ein unbesuchter Knoten in G, so muss er in einer anderen
Zusammenhangskomponenten liegen.
// Stapel initialisieren und beliebigen Anfangsknoten drauflegen
Stack s = new Stack();
s.push(G[0]);
a.visited = true;
while !s.isEmpty() {
Node v = s.pop();
// Lege alle noch nicht besuchten Nachbarn auf den Stapel
for Node n in v.neighbours() {
if n.visited == false {
n.visited = true;
s.push(n);
}
}
}
// Sollte ein Knoten noch nicht besucht sein, dann liegt er in einer anderen Komponente
for Node n in G {
if !n.visited { return false; }
}
return true;
Die Laufzeit ist der aus Variante 1 deutlich überlegen, sie beträgt trotz der
zusätzlichen Überprüfung des Besuchs aller Knoten noch \(\mathcal O(n+m)\).
4. Spezialformen: Bäume und partite Graphen
In vielen Anwendungsbereichen erfüllen Graphen, nachdem sie modelliert wurden, spezielle Eigenschaften.
Oder man sucht Teilgraphen, die spezielle Eigenschaften erfüllen. Mindestens einen solchen Spezialfall
haben wir bereits kennengelernt, nämlich den zusammenhängenden Graphen, in dem jeder Knoten von
jedem anderen aus erreichbar ist. Diese Eigenschaft ist in der Routenplanung besonders wünschenswert und
kann global (siehe Google-Maps) zum Beispiel durch die Integration von Fähren- und Luftrouten
zwischen den Kontinenten und Inselgruppen der Welt sichergestellt werden. Im Folgenden führen wir zwei
andere praxisrelevante Sonderformen ein: Bäume und partite Graphen.
Bäume
Der maximal kreisfreie Graph \(B\): ein Baum.
Einen Graphen, der gleichzeitig zusammenhängend und kreisfrei ist, bezeichnet man als Baum.
Allgemeiner nennt man einen Graphen, dessen Komponenten
alle Bäume sind, einen Wald. Alle Knoten eines Baumes mit nur einer inzidenten Kante nennt
man Blätter. Satz 0.5.1 aus Diestels Graphentheorie offenbart uns die
wichtigsten Äquivalenzen eines Baums:
Die folgenden Aussagen sind äquivalent für einen Graphen \(G\):
\(G\) ist ein Baum.
Für je zwei Knoten \(a,b\) enthält \(G\) genau einen \(a\)-\(b\)-Weg.
\(G\) ist minimal
zusammenhängend.
\(G\) ist maximal
kreisfrei.
Viele Graphalgorithmen (z. B. Wegfindung oder Ermittlung eines zentralen Knotens) lassen sich auf
Bäumen noch effizienter implementieren. Oft ist das Ziel auch, einen Teilgraphen eines
(nichtkreisfreien) Eingabegraphen \(G\) zu finden, so dass er die Eigenschaften eines Baumes erfüllt und
gleichzeitig alle Knoten von \(G\) enthält. Man nennt einen solchen speziellen Teilgraphen
Spannbaum.
Oftmals ist es vorteilhaft, sich Bäume mit einer konkreten Ausrichtung vorzustellen: Beginnend in einem beliebigen Knoten — der Wurzel — werden alle Knoten in Ebenen angeordnet. Die Wurzel befindet sich ganz oben, darunter kommen die direkten Nachbarn der Wurzel, darunter deren Nachbarn und so weiter. Unsere Unit zu Heaps zeigt viele solche Baumdarstellungen.
Die Knoten, die direkt unter einem anderen Knoten \(v\) hängen, heißen Kinder von \(v\); der Knoten \(v\) selbst ist deren Vater- oder Elternknoten. Die Kinder eines Knoten \(v\), deren Kinder und Kindeskinder usw. heißen Nachfahren von \(v\) und bilden gemeinsam mit dem Knoten selbst den in \(v\) gewurzelten Teilbaum.
Partite Graphen
Verschiedene Darstellungen partiter Graphen. Die einzelnen Partitionen sind farblich
hervorgehoben.
Bildet man einen Graphen \(R\) aus einer Menge von Arbeitern (Knoten), Aufgaben (Knoten) und
Aufgabenpräferenzen der Arbeiter (Kanten), dann wird deutlich, dass \(R\) in zwei
Partitionen zerfällt, deren Knoten untereinander keine Kanten teilen: die der
Aufgaben und der Arbeiter. Graphen, die vollständig in \(k\) solcher Partitionen
zerfallen, nennt man \(k\)-partit. Unser Graph \(R\) ist also 2-partit oder bipartit. Vollständige \(k\)-partite Graphen bezeichnet man auch mit
\(K_{n_1,...,n_k}\), wobei \(n_i\) die Anzahl der Knoten der \(i\)-ten Partiton angibt.
Gesucht ist nun eine maximale Menge knotendisjunkter Kanten, also eine optimale Aufgabenzuordnung.
Diese Problemstellung hat in vielen Gebieten große Relevanz, man bezeichnet sie als
Matching oder Paarung.
Schon die bipartiten Graphen eröffnen ein weites Forschungsfeld. Zum Beispiel geht es um die
algorithmischen Fragestellungen: Wie kann ein solches Matching gefunden werden? Existiert ein perfektes Matching? Ist ein gegebener Graph bipartit?
Verständnisaufgaben zu Abschnitt 4
Beweisaufgabe — Kannst du’s zeigen?
Beweise die folgenden Sätze:
Jeder Baum \(T = (V,E)\) mit \(|V| \geq 2\) enthält mindestens zwei
Blätter.
Jeder Baum \(P\) hat mindestens so viele Blätter wie \(\Delta(P)\).
Hinweise
Wähle für beide Sätze entweder eine Startkante oder einen Starknoten, traversiere
den Graphen und nutze eine Baumeigenschaft.
Beispiellösung
Sei \(\{v,u\} \in E\) eine beliebige Kante. Nun traversieren wir so lange
in Richtung von \(v\) und nach \(u\), bis wir bei einem Blatt ankommen.
Dabei ist es egal, wo lang wir genau gehen, da \(T\) keine Kreise
enthält und wir eine Kante bzw. einen Knoten deswegen nur höchstens
einmal besuchen. \(T\) ist außerdem endlich, weshalb wir irgendwann in
beiden Richtungen in einer Sackgasse, also einem Blatt,
terminieren.
In \(P\) existiert mindestens ein Knoten \(v\) mit \(d_G(v)=\Delta(P)\).
Beginnend bei \(v\) traversieren wir den Graphen wie in 1. in alle
\(\Delta(P)\) Richtungen.
5. Erweiterungen: Gerichtete Graphen und Kantengewichte
Unser Modell eines Graphen scheint zwar bereits äußerst vielseitig, stößt bei vielen
Problemmodellierung jedoch schnell an seine Grenzen. Für die meisten Praxisanwendungen ist es nötig,
die Kanten eines Graphen zu richten, also nur in eine Richtung begehbar zu machen. Um einen
Weg dem anderen gegenüber zu präferieren, muss neben der Anzahl der Kanten auch eine spezielle
Kantenwichtung verfügbar sein. Beide Modelle stellen wir nun kurz als Ausblick vor.
Gerichtete Graphen
Der gerichtete, kreisfreie Graph (DAG) \(D\).
Betrachtet man zum Beispiel zwei Orte \(a, b\) (die in einem Graphen als Knoten dargestellt sind),
welche durch genau eine Einbahnstraße verbunden sind, dann wäre es nicht sinnvoll, diese Kante als
ungerichtete Menge \(\{a,b\}\) zu abstrahieren. Eine gerichtete Kante hingegen ist als
geordnetes Paar \((a,b)\) definiert. Graphen können entweder nur ungerichtete oder gerichtete Kanten
enthalten, man nennt sie dann ungerichtet respektive gerichtet.
Alle der besprochenen Termini lassen sich intuitiv für gerichtete Graphen formulieren, zum Beispiel
kommt jedem Knoten \(v\) nun ein gesonderter Ausgangs- und Eingangsgrad für die Anzahl
ausgehender Kanten \(d^+_G(v)\) bzw. die der eingehenden \(d^-_G(v)\) zu.
Ein gerichter Weg \(P^k=v_1v_2...v_{k + 1}\) ist nichts anderes als ein nichtleerer Graph mit
Knotenmenge \(\{v_1,v_2,...,v_{k + 1}\}\) und Kantenmenge \(\{(v_1,v_2),...,(v_k,v_{k +
1})\}\). Ein gerichteter Kreis ist also \(C^k = P^{k-1} + (v_k, v_1)\).
Wenn wir die Richtung aller Kanten eines gerichteten Graphen \(G\) umkehren, so erhalten wir den
transponierten Graphen \(G^T\).
Ein gerichteter, kreisfreier Graph hat den Spezialbegriff DAG. In jedem DAG existiert mindestens ein
Knoten \(q\) mit \(d^-_G(q)=0\): die
Quelle. Und es existiert mindestens ein Knoten \(s\) mit \(d^+_G(s)=0\): die
Senke. Jeder DAG verfügt über mindestens eine topologische Sortierung,
welche eine Reihenfolge \((v_1, ..., v_n)\) aller Knoten des Graphen darstellt, die die Eigenschaft
erfüllt, dass nur Kanten der Form \((v_i, v_j)\) mit \(j>i\) existieren.
Gewichtete Graphen
Approximierte Fahrzeiten in Minuten modelliert als vollständiger,
gewichteter Graph \(W\).
Nehmen wir wieder zwei Orte \(a,b\), die nun über eine direkte Straße von 1km und einer direkten Umgehungsstraße von 3 km verbunden sind. Es ergibt sich intuitiv die
Fragestellung, nicht nur einen Weg von \(a\) nach \(b\) zu finden, sondern eben einen
kürzesten Weg. Unser herkömmliches Graphmodell erweitern wir dazu um eine
Gewichtsfunktion\(w\colon E \rightarrow \mathbf{R}\), so dass wir einen
gewichteten Graphen als \(G = (V,E,w)\) beschreiben. Die Wichtungen sind natürlich
nicht nur auf Weglängen beschränkt, sondern können jede messbare Entität darstellen.
Die zusätzliche Wichtung eröffnet vielen bereits besprochenen Problemfeldern eine neue
Optimierungsdimension. Man sucht nun zum Beispiel minimale/maximale Spannbäume oder den kürzesten
\(a\)-\(b\)- oder Hamiltonweg. Kombiniert man einen gerichteten, kreisfreien Graphen (DAG) mit
zusätzlichen Kantengewichten, dann handelt es sich um ein Netzwerk, welches man auf die
maximal-übertragbare Kapazität zwischen einer Quelle und einer Senke untersuchen kann.
Verständnisaufgaben zu Abschnitt 5
Beweisaufgabe — Kannst du’s zeigen?
Beweise die oben postulierte Aussage, dass jeder gerichtete, kreisfreie Graph \(G = (V,E)\)
mindestens eine Quelle \(q\) mit \(d_G^-(q) = 0\) enthält. Schlussfolgere daraus,
dass auch eine Senke \(s\) vorhanden sein muss.
Hinweise
Nimm an, jeder Knoten besitzt mindestens eine eingehende Kante, und führe
das zum Widerspruch.
Beispiellösung
Ich nehme an, für jeden Knoten \(v_i\) gilt \(d_G^-(v_i) \geq 1\). Dann wähle ich
ein beliebiges \(v_i\) und traversiere rückwärts zum Knoten \(v_{i-1}\)
für den \((v_{i-1},v_i)\) in \(E\) liegt. Da jeder Knoten per Annahme mindestens
einen solchen adjazenten Knoten besitzt und \(G\) aber azyklisch und endlich
ist, muss irgendwann ein letzter Knoten \(v_0\) mit \(d_G^-(v_0) = 0\)
erreicht sein. Damit ist ein Widerspruch erzeugt, \(v_0\) ist die Quelle.
Die Existenz einer Senke lässt sich mit analoger Argumentation für den
Ausgangsgrad zeigen.
Ende des Lehrinhalts, unten findest du weiterführendes Material
I. Quellen und weiterführendes Material
Neben zahlreichen Wikipedia-Artikeln aus dem Themengebiet der Graphentheorie existieren
weitere Ressourcen, die wir zum tiefgehenderen Studium besonders empfehlen. Zu beachten ist, dass nicht
überall dieselbe Notation verwendet wird.
R. Diestel - Graphentheorie (Springer, 2000)
Standardwerk mit allen Termini, wichtigen Beweisen und Aufgaben.
Zusammenfassung aller wichtigen Termini von mir akkumuliert aus dem Diestel und Wikipedia
von den hier behandelten Grundbegriffen bis zu Minoren, Cliquen, DAGs, Färbungen und
planaren Graphen.
Nach sehr knapper graphentheoretischer Einführung werden alle Felder der Algorithmik mit
Graphen ausführlichst beleuchtet. Gut zum Nachschlagen.
Algorithm Engineering
Our research focus is on theoretical computer science and algorithm engineering. We are equally interested in the mathematical foundations of algorithms and developing efficient algorithms in practice. A special focus is on random structures and methods.